
|
网络技术的广泛应用,对控制系统的理论和应用都提出了新的挑战,同时也带来了崭新的研究机遇和发展空间。网络控制是在这种氛围下发展起来的。与常规的控制技术相比,网络控制不论是在理论上还是在应用上,都有其自身的特点,例如数据传输时间的非定常性、数据传输的非完整性、非有序性、非确定性等等。这些特点给控制及相关学科领域的学者带来了新的课题,需要进一步研究和探讨。 ⑴ 网络控制特点 网络控制系统通常具备下述特点 ① 非定常性。数据到达的时刻不再是定常和有规则的, 更不能再用简单的采样时间来刻画。 ② 非完整性。由于数据在传输中可能发生丢失和出错,数据不再是完整的,当然数字控制中也可能有类似的现象,但在网络控制中发生的可能性要大得多。 ③ 非有序性。由于网络传输时间的不确定,先产生的数据可能迟于后产生的数据到达远程控制系统。因此, 数据到达的次序可能不再遵守原有的时间顺序。 ④ 非确定性。由于数据到达的随机性,整个控制过程已不再是一个确定性的系统,而是一个随机系统。 对这样一类系统,需要用现有的控制理论成果,如时延控制、鲁棒控制、自适应控制等等,或者引入新的方法去研究其稳定性、可控性、可观性、鲁棒性等系统特性,以及相关算法的收敛性、收敛区域、收敛速度等等。 ⑵ 网络控制结构 根据系统构成,网络控制系统通常具备如图1所示的结构或图2所示的结构。其非定常性、非完整性、非有序性和非确定性体现在反馈传输和决策传输两个环节中。  图1 网络控制系统结构图一  图2 网络控制系统结构图二 在图1所示的网络控制系统结构中,远程遥控制器直接与广义受控对象相连。这种结构中有如下情形发生 ① 当网络传输的延时远小于系统的时间常数时,基于网络的直接控制系统可以看作是一个由网络数据传输而造成的纯延时系统; ② 当网络传输的延时远大于系统的时间常数时,基于网络的直接控制系统将不稳定,无法实现控制目的; ③ 当网络传输的延时与系统的时间常数相差不多时。基于网络的直接控制系统的行为将变的不确定并较为复杂。 在这种网络控制系统结构中,基本设计思想应当是“当地简单,远程复杂”。其优点就是较高的性能价格比,即在实现智能化的前提下,做到当地系统的低成本。当地系统是通过网络来支撑的。然而,一旦网络出现故障,当地受控系统就变成“傻瓜”式“低性能”系统,濒于瘫痪状态。其次,反馈信息一旦传到远程决策系统,它就可以利用其丰富的计算资源对这些信息进行各种有效和复杂的分析,也就是反馈补偿。比如对反馈进行插值、预估,以及构造各类的观测器对延时进行补偿。既可以采用传统的算法,也可以使用新的各类计算智能算法,如神经元网络和遗传算法等。在“远程复杂”原则之下,可以解决许多由于资源(比如存贮空间和计算能力等)和实时限制的经济性或技术性控制难题。当然,对于当地系统如果需要也可以进行类似的控制补偿或决策补偿。 在图2所示的网络控制结构中,增加了本地控制器。本地控制器主要解决控制系统的镇定问题,即维持系统的稳定性,同时和远程控制器协同对受控对象进行控制。 目前,基于Internet(广域网)的控制只是处于起步阶段。其中,第一种结构的网络控制问题在理论和技术上远没有得到解决。第二种结构已经有人开始研究,并得到了初步研究成果。当然,不局限于上面提到的两种结构形式,实际上网络控制结构会随着要求的不同而出现各种各样的形式。 ⑶ 网络控制应用问题 鉴于Internet网络可以互相传递信息,共享硬件、软件、数据信息等资源的强大的信息交换、资源管理和协同作业等功能,基于Internet网络的控制在控制领域的应用中有着如下优势: ① 能够远程遥监测、控制被控对象的特性和行为; ② 能使世界各地的专家足不出户、协同作业对被控对象进行控制; ③ 从商业角度来说,由于员工的地理可分散性,大大提高了企业或公司的经营效率,从而降低了企业或公司的经营成本。 在网络控制应用中,首先要面对的是①如何解决网络不确定性时延问题;②如何设计网络化的人机界面;③如何分配多用户之间的关系;④网络安全问题。 对于这些问题需要从几个方面考虑,分别为:明确系统性能指标;设计网络用户界面;解决网络延时控制问题;多用户之间的协调登陆问题;网络安全性能检查。下面分别加以简要介绍。 ① 明确系统性能指标 在网络控制中,提出明确的系统性能指标是非常重要的。因为不同的系统性能指标会导致不同的网络控制结构。这些系统性能指标要包括远程监督问题和系统控制目标。其中所提出的控制目标必须是在现有的技术条件下能够实现的。 ② 网络用户界面设计 通常,用户界面至少包含两个窗口:一个是过程监督窗口,另一个是过程控制窗口。当前过程的工作状态、受控对象的当前数据信息及相关的历史数据在过程监督窗口中显示,而控制窗口中显示过程控制参数。根据需要还可以增设其他的功能窗口。 ③ 对网络时延的补偿控制问题 (a)网络控制中的时延 网络控制中产生的延时如图3所示。  图3网络控制中的时延示意图 在图3中,可以看出一次完整的网络控制的循环时间是由四部分时间相加而成,即为 (b)控制器参数调整策略 控制器参数调整策略是应用于网络控制的远程端的一种控制策略,如图4所示。这种策略对由于网络所产生的时延具有不敏感性,只是用于调整受控系统的设定值和本地控制器的控制器参数(如PID控制器参数等)。对被控对象的具体的控制行为通过本地控制器完成。  图4 控制器参数调整策略示意图 因为本地控制器通过容错控制设计可以在本地构成容错控制系统,同时由于使网络而产生的时延被排斥到本地闭环控制系统的闭环之外,所以这种控制策略有着较高的可靠性。一旦本地控制器出现了故障,而不能完成所承担的控制任务,远程控制器应当通过Internet对被控对象进行遥控制。这时,控制器参数调整策略的内涵发生了转变,多使用基于模型的控制方法对被控对象进行直接遥控制。这种情况下如何知道本地系统发生了故障及远程遥控算法如何补偿网络时延产生的影响便成了有待解决的问题,有兴趣的读者可以做进一步的研究和探讨。 ④ 多用户登陆问题 和传统的计算机控制系统相比,基于网络的控制系统有其独特的特点:不仅允许多用户(指远程控制端)存在,并且用户的数量和位置也是不确定的。彼此之间的情况知之甚少,甚至全不了解。(//www.shop-samurai.com/版权所有)若不限定优先权限级别,则可能出现多次设定系统设定值和多次调整本地控制器参数的局面,对控制非常不利,甚至可能出现可怕的后果。通常,可按下述步骤多用户登陆问题: (a)将所有的用户(远程控制端)分为几个优先级,可通过密码来识别登陆用户的优先级。 (b)本地系统接收到命令信息后,应该设定一段缓冲时间。在缓冲时间内,本地系统暂不接受由同级或低级远程用户发送来的命令信息,以确保接收到的命令被可靠的执行。 (c)通过网络调整本地控制器参数时,只有最高级别的用户(例如高级工程人员)才有权进行操作。 ⑤ 网络安全问题 除了采取上述的各种措施来保证基于网络的控制系统正常运行之外,网络安全性也对网络控制系统的正常运转起着重要的作用。Internet的安全问题集中在以下四个方面: (a)端一端的安全问题,主要指用户(包括代理)之间的加密、鉴别和数据完整性的维护; (b)端系统的安全问题,主要涉及防火墙技术; (c)安全服务质量问题,主要指如何保证合法用户的带宽,防止用户非法占用带宽; (d)安全的网络基础设施,主要涉及路由器、城名服务器,以及网络控制信息和管理信息的安全问题。 关于网络的安全问题有专门的文献论述,有兴趣的读者可以查阅相关的文献。 |
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项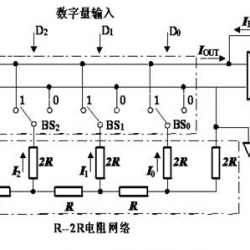 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式电工学习网 ( )
GMT+8, 2021-12-6 20:44