|
伺服系统是自动控制系统中的一类,原称位置随动系统,简称随动系统。伺服系统是用来控制被控对象的某种状态,使其能自动地、连续地、精确地复现输入信号的变化规律,通常是闭环控制系统。
本节所介绍的伺服系统是以计算机作为控制器的数字伺服系统。自动控制理论和计算机技术是数字伺服系统技术的两个主要依托。下面介绍以单片机作为控制器的直流电机数字伺服系统设计。
本系统的设计目的是设计以单片机为核心的控制系统,通过数字控制器对直流伺服电机输出转角 进行控制。 进行控制。
1. 系统硬件设计
硬件系统由单片机、电源、键盘显示器、数字控制器、直流伺服电机、光电编码器和可调整模拟负载组成,系统硬件原理图如图1所示。
单片机与外部ROM、RAM的接口:PSEN低电平时,读ROM(27512);RD为低时,读RAM(6264),WR为低时,写6264。
单片机与A/D芯片的接口:当A14为低时,RD、WR对ADC0809操作。ALE与START相连,地址锁存同时启动A/D转换。ADC0809的IN0做位置及速度的参考输入。
单片机与DAC0832的接口:WR为低时,DAC0832将数据总线上的数据转换为单极性电流输出。
PWM功率放大器原理:运放IC9A、IC9B及其外围元件构成了三角波发生器,IC10A做比较器,模拟量与三角波电压比较,输出宽度可变的方波脉冲。

图1 系统硬件原理图
键盘显示器设计:RXD接最高位74LS164串行移位寄存器,TXD接74LS164外部时钟引脚。74LS164并行输出端接LED段驱动输入端。TXD受p3.2控制,p3.2低时,TXD驱动显示器;p3.2高时,对键盘操作。
2.伺服系统控制器设计
设伺服电机位置随动系统传递函数为 ,其中,k=3724,T1=1.81,T2=0.038,T3=0.15。 ,其中,k=3724,T1=1.81,T2=0.038,T3=0.15。
根据第五章第三节介绍的二阶工程设计法,校正后系统开环传递函数为

则应选择如下形式的控制器

即 
由 ,得 ,得 ,即模拟控制器为 ,即模拟控制器为 。 。
利用后向差分法对模拟控制器进行离散化,得到数字控制器

3.系统软件设计
本系统应用软件包括主程序,D/A转换子程序,A/D转换子程序及控制子程序,其程序流程图如图2所示。从而实现了对直流伺服电机的位置控制。

图2 位置随动系统控制程序流程图
| 
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项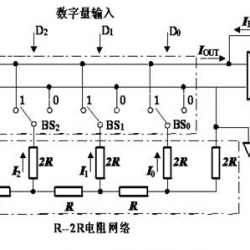 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式