|
��������״̬����ʵ�ֱջ�ϵͳ�ļ������ã���Ҫ����ϵͳ��ȫ��״̬������Ȼ��ϵͳ��״̬�������������ܹ�����������������������ģ���Щ�����������⣻����һЩ�м����������û�г�����������塣���������Ҫ�ڹ�����ʵ��״̬����������Ҫ��ϵͳ��״̬���й��ƣ�������״̬�۲�����״̬�۲�������һ���������Ͽ���ʵ�ֵĶ�̬ϵͳ�������ô��۲�ϵͳ�Ŀ�������õ�������������Ϣ�����ƴ��۲�ϵͳ��״̬�������Ա��ø���״̬�����Ĺ���ֵ��������۲�ϵͳ����ʵ״̬��������״̬������ƣ�ʵ�ֱջ�ϵͳ����������á�
����1. ȫά״̬�۲���
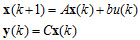
���������������״̬������ֱ������ʱ����Ҫ����״̬������ƣ������ȫ��״̬�������й۲⡣��ʱ�����״̬�۲�������״������Ľ״���ͬ������Ϊȫά״̬�۲�������������n��������Զ�����ɢϵͳ
���� ������������(1) ������������(1)
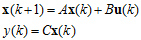
�������У�AΪn��nάϵͳ���� BΪn��r�������CΪn��1ά�������ϵͳ�ṹͼ��ͼ1��ʾ��
����
����������������������ͼ1 ȫά״̬�۲���
��������һ�����ܿ�ϵͳ������ͬ�����Ķ�̬ϵͳ
���� ��������������(2) ��������������(2)
������ϵͳ(1)��(2)�ij�ʼ״̬��ȫһ��ʱ��������ϵͳδ������ʱ�̵�״̬ҲӦ��ȫ��ͬ������ʵ��ʵ��ʱ�������ܱ�֤���߳�ʼ״̬��ȫ��ͬ��Ϊ�ˣ�Ӧ��������ϵͳ״̬�����źŹ���״̬���ջ�ϵͳ��ͨ����������ʹ���ϵͳ��״̬�������㡣����ԭ�ܿ�ϵͳ״̬����ֱ�����⣬���ö���ϵͳ���������źŴ��档
�����������������״̬�۲���״̬����Ϊ
���� ����������(3) ����������(3)
�������У�HΪ״̬�۲������������ϵ������,��������ʽ
����
��������״̬�������Ϊ ����ʽ(7.65)��(7.67)����ɵ� ����ʽ(7.65)��(7.67)����ɵ�
���� ����������(4) ����������(4)
������
���� ����������������(5) ����������������(5)
����ͨ��ʽ(5)���Կ�������ѡ����ʵ������������Hʹ��״̬�������ϵͳ(5)�����м����λ��zƽ�浥λԲ�ڣ����������������������㣬��״̬����ֵ���������ڿ��Ը�������ʵ״̬���Ҽ���Խ����ԭ��״̬���������������ٶ�Խ�죬��֮Խ�����ɼ��� �ܷ�ƽ�x(k)�Լ��ƽ��ٶ�����H������ġ� �ܷ�ƽ�x(k)�Լ��ƽ��ٶ�����H������ġ�
����ǰ���ᵽ��������״̬��������ϵͳ�����������õij�Ҫ������ԭϵͳ�ܿء�Ӧ�ö�żԭ��������֪ͨ��ѡ��Hʹϵͳ(5)��������������õij�Ҫ���������Զ�����ɢϵͳ(A��B��C)��ȫ�ܹ۲⡣
������ָ��״̬�۲���������ֵΪ ������������������Ϊ ������������������Ϊ
���� ��������(6) ��������(6)
����״̬�۲�������������ʽΪ
���� ������������(7) ������������(7)
�����Ƚ�ʽ(6)��(7)����z���������ϵ���ɵõ�һ��nԪ�����飬���п���������������ϵ������H��
��������1�� ��֪ϵͳ��״̬����
����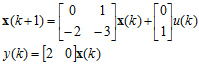
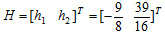
����������״̬�Բ���ֱ�����⣬����ơ�״̬�۲�����ʹ�۲�����������Ϊ �� ��
�����⣺������ͼ1��ʾ״̬�۲����ṹ����۲���ϵͳ����Ϊ
����
����״̬�۲�����������ʽΪ
����
�����۲���������������ʽΪ
����
������ �Ƚ� �Ƚ� ��������ϵ���� ��������ϵ����
����
��������������ϵ������Ϊ
����
����2. ��ά״̬�۲���
����ϵͳ״̬�ܹ���ָϵͳ�ĸ���״̬���������ڿ�ͨ�����Y(k)�۲��������Щ״̬������ʱ�̿��������ֱ�ӹ۲����������״̬��Ϊֱ���ܹۡ�����������в�Ϊ0��Ԫ������Ӧ��״̬���ǿ�ֱ�ӹ۲�ġ�
����һ��أ���֪nάϵͳ���ܹ۲�ģ���������������m����˵��ϵͳ״̬��m���ǿ���ֱ�ӹ۲�ģ�����Ҫ��ϵͳ��n��״̬ȫ�����й۲⣬��ֻ�������n-m��״̬���й۲⼴�ɡ�������(n-m)ά״̬�۲�������ȫά״̬�۲���������ά�����ڱ���ϵͳ״̬�����Ĺ۲�����Ϊ��ά�۲�����
���������Ե���������ϵͳΪ�����ܽ�ά�۲�������ơ�
����(1) ϵͳģ��Ԥ������
������֪nά���Զ�����ɢϵͳ(A��B��C)�ܹ۲⪥
���� ��������������(8) ��������������(8)
�������У�x(k)Ϊnά״̬������y(k)Ϊmά�����������
������ ״̬�ֽ�
�����Ƚ�״̬x(k)�ֽ�������֣���ֱ�Ӳ�������  ά)������ֱ�Ӳ������ع����� ά)������ֱ�Ӳ������ع�����  ά������ ά������
���� ����������(9a) ����������(9a)
���� ������������(9a) ������������(9a)
�������У�A11Ϊ(n-m)��(n-m)ά��A12Ϊ(n-m)��mά��A21Ϊm��(n-m)ά��A21Ϊ(n-m)��mά��b1Ϊ(n-m)��1ά�� b2Ϊm��1ά��
������״̬�����ֿ���дΪ��
���� ��������(10a) ��������(10a)
���� ��������(10a) ��������(10a)
������x2(k)ֱ���ܹ۲⣬����ʽ(7.74a)�����Ǵ��۲�״̬������״̬���̡�Ϊ���ÿ�ֱ�ӹ۲�x2(k)���Ʋ���ֱ�ӹ۲��x1(k)������һ���������
���� ������������(11) ������������(11)
������ �۲���ģ�ͽṹ��
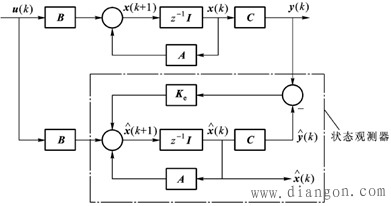
��������ϵͳ�Ľ�ά״̬�۲���ʵ�����൱��ȫά�۲�������ϵͳ����˲�����ȫά�۲�����ͬ���������˼�룬���콵ά�۲�������ṹ��ͼ2��ʾ��
����
������������������������ͼ2 ��ά״̬�۲����ṹ
�����۲���ģ��Ϊ
���� ����������(12a) ����������(12a)
���� ����������������(7.76b) ����������������(7.76b)
������۲���״̬��� ,ͬȫά�۲���������ƣ��� ,ͬȫά�۲���������ƣ���
���� ����(13) ����(13)
����ϵͳ�Ľ�ά�۲����൱������ϵͳ��ͬά�۲�����
���� ��������(14a) ��������(14a)
���� ������������(14b) ������������(14b)
�������ʽ(7.78)��������ϵͳ�ܹ۲⣬���ͨ��ѡ��H������������ �ļ��㣬������۲���״̬�ƽ���ʵϵͳ״̬���ٶȵ�Ҫ����֤��������ϵͳ���ܹ۲�ġ�Ҳ����˵�����ϵͳȫά״̬�۲������ڣ���ά�۲���һ�����ڡ�����ͨ��ѡH��������������״̬�������ϵͳ�ļ��㡣 �ļ��㣬������۲���״̬�ƽ���ʵϵͳ״̬���ٶȵ�Ҫ����֤��������ϵͳ���ܹ۲�ġ�Ҳ����˵�����ϵͳȫά״̬�۲������ڣ���ά�۲���һ�����ڡ�����ͨ��ѡH��������������״̬�������ϵͳ�ļ��㡣
����(2) ��ά�۲���ʵ�֪�
������z����ʽ(12)����۲�������(13a)�У���
���� ������(15) ������(15)
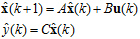
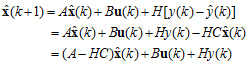
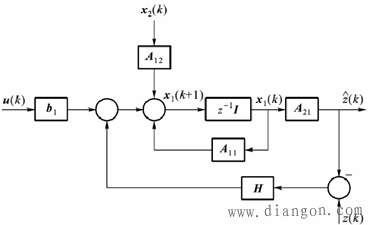
������ʽ�У� ��ֱ�ӵõ��������һ�� ��ֱ�ӵõ��������һ�� ʵ�������ѣ��� ʵ�������ѣ��� ��Ԥ��ֵ����ʱ�ɲ���ͼ3�ṹ�任������õ���ά״̬�۲���ʵ�ֵĽṹ��ͼ4��ʾ�� ��Ԥ��ֵ����ʱ�ɲ���ͼ3�ṹ�任������õ���ά״̬�۲���ʵ�ֵĽṹ��ͼ4��ʾ��
����
��������������������ͼ3��ά״̬�۲���ʵ�ֵĽṹ�任��ʾ��ͼ
����
��������������������������ͼ4 ��ά״̬�۲�����ʵ��
| 
 ���ü��������ϵͳ
���ü��������ϵͳ ���������ϵͳ�Ļ�������ԭ��
���������ϵͳ�Ļ�������ԭ�� PC6313�ɼ�����ʹ��
PC6313�ɼ�����ʹ�� PC-6313 �ɼ������ܲ�������װʹ��ע������
PC-6313 �ɼ������ܲ�������װʹ��ע������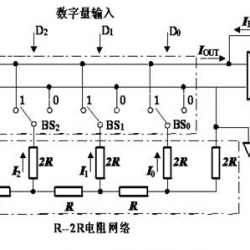 D/Aת��������ԭ��������ָ��
D/Aת��������ԭ��������ָ�� ģ�������ͨ����������ɼ�����������ʽ
ģ�������ͨ����������ɼ�����������ʽ