
|
��������״̬�����ļ�����������Ҫ˼���ǽ�ϵͳ�����е�״̬������Ϣͨ������������������������ο����������ã�������Ϊ�ܿ�ϵͳ�Ŀ������롣ͨ����״̬���������ѡ��ʹ�ջ�ϵͳ�ļ�����������ϣ����λ���ϡ� ��������״̬�����������ñջ�ϵͳ����ij�ֱ�Ҫ������ϵͳ״̬��ȫ�ܿء���ӹ��������Ϸdz��������⣬��Ϊֻ��ϵͳ״̬��ȫ���������Ŀ��ƣ�����ͨ��״̬������ȫ�ı�ԭϵͳ�����ԣ���ʵ��ϵͳ������������á���ϵͳ״̬����ȫ�ܿأ���ֻ��ͨ��״̬�������������ܿز��ֵ�״̬����Ӧ��ϵͳ�ļ��㡣��ص�����֤��������йص��Զ�����ԭ���̲ġ���״̬������·���ź���������ÿһ��״̬����������Ҫ��ϵͳ��ȫ��״̬����ֱ�����⡣��ϵͳ��ijЩ״̬����ֱ������(��ijЩ״̬����������ʵ�������������)ʱ����Ҫ���״̬�۲����Ƚ�����ֱ�������״̬�۲������Ȼ���ٽ��з��������ַ�������7.5���н������ڱ�����������ϵͳȫ��״̬����ֱ���������Ρ� �����豻��ϵͳ��ͼ7.3��ʾ�� ����  ������������������ͼ7.3 ���ض���ṹͼ ������״̬����Ϊ ���� ����ʽ�У�x(k)Ϊkʱ�̵�nά״̬������u(k)Ϊk����ʱ�̵Ŀ����źţ�AΪn��nά����bΪn��1ά������������������ʽ��״̬���� ���� ����ʽ�У� ����  ����ͼ7.4 ״̬�����ջ�ϵͳ �������Ա���Ϊ ���� ������ϵͳ(A, b)����ȫ�ܿ� �����������״̬�����õ��ıջ�ϵͳ�ļ�������������á��� ������(A, b)�ܿأ����������������ܿر���(�����ǣ���ͨ������������Ա任ת�����ܿر���)�� ���� 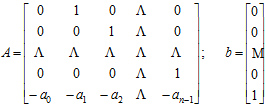 ����������(7.50) ����������(7.50)������״̬������ıջ�ϵͳ��״̬������������ֱ�Ϊ ����  ������(7.51) ������(7.51)�����ջ�ϵͳ��������Ϊ ���� ������ջ�ϵͳ����������Ϊ ����  ������(7.53) ������(7.53)������ʹ������״̬�����ıջ�ϵͳ�����ܱ����ó�����ֵ������ʽ(7.52)��(7.53)�еĸ������ϵ����Ӧ��ȣ��� ����  ������������(7.54) ������������(7.54)�������ɵõ�״̬����������� ����ʽ(7.52)��(7.53)��(7.54)������״̬��������������Ʋ��裬��Ҳ�ʺ���ϵͳ�����ܿر���ʱ�ĸ�һ����ʽϵͳ����ơ� �����Ƚ�ʽ(7.50)��(7.51)����֪�ܿر��;���״̬��������Ȼ���ܿر��͡�Ҳ����˵ϵͳ���ܿ��Բ�����������״̬�����������ı䡣��������״̬�����ı��˱ջ�ϵͳ�����λ�ã���������ջ�ϵͳ�㡢����Ķ��������ݶ���7.4�������ϵͳ�з������㡢�����������ϵͳ�ܿ��Բ������仯����ô��ϵͳ���ܹ��Ա�Ȼ�ᷢ���仯��������������Ҫ���۴��ڡ� ��������7.6 ����ϵͳ(7.4)��״̬���������벻�ı�ϵͳ���ܿ��ԣ������ܸı�ϵͳ���ܹ��ԡ� ��������7.5�� ��֪����ϵͳΪ ���� ����Ҫ��ջ�����Ϊ ������ �����ջ���������Ϊ ���� ������״̬����������� ����  ����(7.56) ����(7.56)�������(7.55)��(7.56)�е� ���� ������� �����������÷�����Ҫ����Ʋ����Dz�������T��ѡȡ�ջ������λ�á�����ƽ��ջ����������λ�ã�ǰ���½�Ҳ���������ۣ��ر�Ҫע��ѡȡ���������λ�á�����λ�õ�ѡȡ�跴���ؽ��У�ֱ���õ������ϵͳ����Ϊֹ |
 ���ü��������ϵͳ
���ü��������ϵͳ ���������ϵͳ�Ļ�������ԭ��
���������ϵͳ�Ļ�������ԭ�� PC6313�ɼ�����ʹ��
PC6313�ɼ�����ʹ�� PC-6313 �ɼ������ܲ�������װʹ��ע������
PC-6313 �ɼ������ܲ�������װʹ��ע������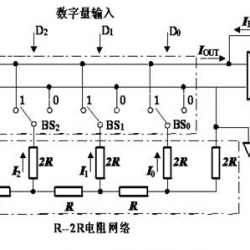 D/Aת��������ԭ��������ָ��
D/Aת��������ԭ��������ָ�� ģ�������ͨ����������ɼ�����������ʽ
ģ�������ͨ����������ɼ�����������ʽ�繤ѧϰ�� ( )
GMT+8, 2021-12-6 20:44