
|
给定如下的单输入—单输出线性定常离散系统的差分方程 式中,k表示kT时刻;T为采样周期;y(k),u(k)分别为kT时刻的输出量和输入量; 可得如下所示的动态方程  写成向量—矩阵形式为  可以简记为式的形式。式中,A为友矩阵;A, B为能控标准型。D为零矩阵。 线性定常离散时间系统的结构图如图1所示。  图1 线性定常离散时间系统结构图 由于矩阵D只表示输入对输出的直接传递作用的强弱,不影响系统状态,不影响系统的动态响应性质,所以在状态空间描述中,常常不考虑矩阵D的影响。这时系统的状态空间描述为 (1)求解离散动态方程 采用递推方法解矩阵差分方程是很方便的,尤其适用于编写计算机程序求解。令式中的  (3) (3)式(3)即为线性定常离散状态方程的解。又称离散状态转移方程。式中,记 将式(3)和(4)分别代入到式(b)中,可得输出表达式为 或 式(3)和(4)给出了完整的线性定常离散动态方程的解的形式。 在第三章中介绍过,离散系统的稳定性取决于系统的特征根,也就是系统的极点,若系统所有的特征根均在单位圆内,则系统是稳定的。这一结论也适合于本章中讨论的线性定常离散系统。 (2)离散动态方程与脉冲传递函数的关系 给出了脉冲传递函数,可以用不同形式的状态方程和输出方程表示;同样,给出了状态方程和输出方程可以导出系统的脉冲传递函数或脉冲传递矩阵(多输入—多输出系统对应着传递函数矩阵)。 重写线性定常离散系统的动态方程 对上面方程两端求z变换,可得 在零初始状态下,整理式(6),可得 因此,系统的脉冲传递矩阵为 G(z)的逆z变换称为系统的脉冲响应矩阵(对单输入单输出系统称为脉冲响应序列),即 将式(7.12a)进行逆z变换可得 比较式(1)和(10),有 根据z变换的实数位移定理,式(8)可表示为 式中, 当k<1时, |
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项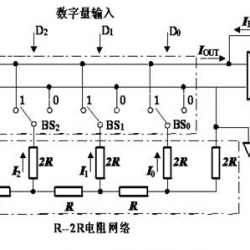 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式电工学习网 ( )
GMT+8, 2021-12-6 20:44