
图1是最少拍控制系统结构图,其中H0(s)为零阶保持器,GP(s)为被控对象,D(z)即为待设计的最少拍控制器。 图1 最少拍随动系统框图 图1 最少拍随动系统框图定义广义被控对象的脉冲传递函数为 这里,广义被控对象的脉冲传递函数在z平面单位圆上及单位圆外没有极点,且不含有纯滞后环节。 闭环脉冲传递函数为 误差脉冲传递函数 则有 根据式(2)知 将其展开如下形式:  (5) (5)根据最少拍控制器的设计准则,系统输出应在有限拍N拍内跟踪上系统输入,即i≥N之后,e(i)=0,也就是说,E(z)只有有限项。 由式(4)可知,E(z)与系统特性Φe(z)及输入信号R(z)有关。因此,在不同输入信号R(z)作用下,本着使E(z)项数最少的原则,选择合适的Φe(z),即可设计出最少拍无差系统控制器。 常见的典型输入信号有: 单位阶跃输入 单位速度输入 单位加速度输入 单位重加速度输入 …… 一般地,典型输入信号的z变换具有如下形式: 式中,A(z-1)是不包含(1-z-1)因式的z-1的多项式。 将式(6)代入式(4),得到 因此,从准确性要求来看,为使系统对式(6)的典型输入无稳态误差,Φe(z)应具有的一般形式为: (8) 式中,F(z-1)是不含(1-z-1)因式的z-1的有限多项式。选择合适的Φe(z)就是选择合适的p及F(z-1)。式(8)及式(3)是设计最少拍控制系统的一般公式。 为使要设计的数字控制器形式最简单、阶数最低,应取F(z-1)=1,这样E(z)中关于z-1的项数才会最少。下面分别讨论不同输入下的情况。 (1) 单位阶跃输入 为使E(z)项数最少,选择Φe(z)=1-z-1,即p=1,F(z-1)=1,使Φe(z)具有最简形式,则 由z变换定义可知e(t)为单位脉冲函数,即 也就是说,系统经过1拍,输出就可以无差地跟踪上输入的变化,即此时系统的调节时间ts=T,T为系统采样时间。误差及输出系列如图2所示。  图2 单位阶跃输时的误差及输出序列 (2) 单位速度输入 由式(7)易知,选择p=2, F(z-1)=1, 则Φe(z)=(1-z-1)2,可使E(z)具有最简形式: 则e(0)=0,e(T)=T,e(2T)=e(3T)=e(4T)=…=0 即系统经过2拍,输出无差地跟踪上输入,系统的调节时间ts=2T。误差及输出序列如图3所示。  图3 单位速度输入时的误差及输出序列 (3) 单位加速度输入 由式(7)可知,选择p=3,F(z-1)=1,即φe(z)=(1-z-1)3,可使E(z)有最简形式: 也就是说,经过3拍,系统的输出可以无差地跟踪上输入,即系统调节时间ts=3T。误差及输出序列如图4所示。  图4 单位加速度输入时的误差及输出序列 由上面讨论可以看出,最少拍控制器设计时,Φe(z)或Φ(z)的选取与典型输入信号的形式密切相关,即对于不同的输入R(z),要求使用不同的闭环脉冲传递函数。所以这样设计出的控制器对各种典型输入信号的适应能力较差。若运行时的输入信号与设计时的输入信号形式不一致,将得不到期望的最佳性能。 例如,当Φ(z)是按单位速度输入信号设计时,有 从前面讨论可知,系统输出经2拍在采样点处无差地跟踪上输入。 保持按此选择设计的D(z)不变,对应另两种典型输入时的输出如下: 阶跃输入:  单位加速度输入:  响应曲线如图5所示。  图5 按单位速度输入设计的最少拍系统的响应序列 |
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项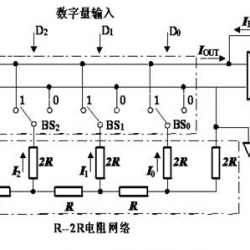 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式
电工学习网
( ��ICP��13005724�� �幫������50010702500116
)
�幫������50010702500116
)
GMT+8, 2021-12-6 20:44