
|
任何一种执行机构都存在一个线性工作区。在此线性区内,它可以线性地跟踪控制信号,而当控制信号过大,超过这个线性区,就进入饱和区或截止区,其特性将变成非线性特性。同时,执行机构还存在着一定的阻尼和惯性,使对控制信号的响应速度受到限制。因此,执行机构的动态特性也存在一个线性工作区。控制信号的变化率过大也会使执行机构进入非线性区。前述标准PID位置式算法中积分项控制作用过大将出现积分饱和,增量式算法中微分项和比例控制作用过大将出现微分或比例饱和,都会使执行机构进入非线性区,从而使系统出现过大的超调或持续振荡,动态品质变坏。为了克服以上两种饱和现象,避免系统的过大超调,使系统具有较好的动态品质,必须使PID控制器输出的控制信号受到约束,即对标准的PID控制算法进行改进,并主要是对积分项和微分项进行改进。 |
 常用计算机控制系统
常用计算机控制系统 计算机控制系统的基本工作原理
计算机控制系统的基本工作原理 PC6313采集卡的使用
PC6313采集卡的使用 PC-6313 采集卡性能参数及安装使用注意事项
PC-6313 采集卡性能参数及安装使用注意事项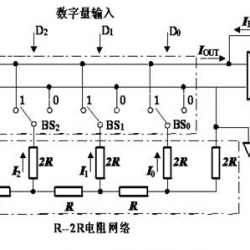 D/A转换器工作原理与性能指标
D/A转换器工作原理与性能指标 模拟量输出通道的任务、组成及基本构成形式
模拟量输出通道的任务、组成及基本构成形式电工学习网 ( )
GMT+8, 2021-12-6 20:44