|
�������ֿ������ļ����Ʒ����ȸ��ݸ���������ָ�꼰���������Ӧ������ϵͳ���ۺ���Ʒ������ģ�������Gc(s)���γ���ͼ1��ʾ��ģ��ջ�ϵͳ���ٰ��ձ��ڽ��ܵ���ɢ��������ģ���������ɢ��Ϊ���ֿ�����D(z)���γ���ͼ2��ʾ�����������ϵͳ��
����
����������������������������ͼ1 ģ��ջ�����ϵͳ
��
����������������������ͼ2 ���������ϵͳ�ļṹ
����������Ʒ����Բ������ڵ�ѡ���бȽ��ϸ�����ơ����ڼ����������A/D��D/Aת������Ѹ�ٷ�չ��ʵ��һ������ģ��������ĵ�Ч���ֿ����������ѡ�ͼ3(a)��ģ���������ͼ3(b)�����Ч�����ֿ��������ڵ�Ч���ֿ������У�����ʱ�������źű��任�������źţ������ֿ������������ٱ�������źš��ɼ����ֵ�Ч�����ǽ�ģ�������Gc(s)����z�任���õ����ֿ�����D(z)�ģ���Ӧͨ��һ����ɢ������ʹ�����н�����ͬ��̬���Ժ�Ƶ����Ӧ���ԡ�
���� 
������������������������������ͼ3 ģ�⻯���ԭ��
����1. ��ַ�
���������Զ�������ϵͳ�У�ģ�������ͨ���ô��ݺ������ַ�������������һģ�������Ϊ
���� 
�������Ӧ���ַ���Ϊ
���� ��������������(1) ��������������(1)
��������ʽ���ߴ�0��t���л��֣���
���� ������������(2) ������������(2)
���������ÿ����������Tʱu(t)��ֵ,��kT������ʽ�е�t,��
����
������
���� ������������(3) ������������(3)
������ʽ(3)�е�kT����(k-1)T,��
���� ����������(4) ����������(4)
����ʽ(3)��ʽ(4)���,��
���� ����������(5) ����������(5)
������ʽ�Ҳ���������ֵ�Ͽ��ø��ַ�������.
����(1) ǰ���ַ�
����ǰ���ַ���һ����ֵ���֣�����(k-1)Tʱ�̵�ֵ���γɵľ��������������֣���ͼ4��ʾ��
������ʽ(5)��дΪ
����
������ʽ��z�任Ϊ
����
��������ɢ��������ֿ��������崫�ݺ���Ϊ
���� ������������6) ������������6)
��������
���� ����������������(7) ����������������(7)
������Gc(s)��D(z)��ȫ��ͬ����������ǰ���ַ�ʱ������Ϊʽ(7)�Ǵ�sƽ�浽zƽ���ӳ�亯����
����������֪,sƽ����ȶ�����Ϊsƽ������ƽ�棬��ͼ5��ʾ����
����
������ΪT>0������ ,��ͼ5��ʾ���ɴ˿ɼ���ǰ���ַ��п��ܽ�s���ƽ����ȶ�����ӳ�䵽zƽ�浥λԲ���Ϊ���ȶ����㣬�����ȶ���ģ���������ɢ��Ϊ���ȶ������ֿ���������ˣ�ʵ��Ӧ���в��ܲ���ǰ���ַ���Ϊ��ɢ�������� ,��ͼ5��ʾ���ɴ˿ɼ���ǰ���ַ��п��ܽ�s���ƽ����ȶ�����ӳ�䵽zƽ�浥λԲ���Ϊ���ȶ����㣬�����ȶ���ģ���������ɢ��Ϊ���ȶ������ֿ���������ˣ�ʵ��Ӧ���в��ܲ���ǰ���ַ���Ϊ��ɢ��������
����
����������������ͼ4 ǰ���ַ��ļ�������
����
����������������������ͼ5ǰ���ַ���ӳ���ϵ
����(2) �����ַ�
���������ַ�Ҳ��һ����ֵ���֣�����kTʱ�̵�ֵ���γɵľ���������ƻ������ͼ6��ʾ����ʽ(5)��дΪ
���� ����������8�� ����������8��
������ʽ��z�任Ϊ
����
��������ɢ��������ֿ��������崫�ݺ���Ϊ
���� ��������������(9) ��������������(9)
��������
���� ��������������(10) ��������������(10)
������Gc(s)��D(z)��ȫ��ͬ�������ú����ַ�ʱ������Ϊʽ(5.10)�Ǵ�sƽ�浽zƽ���ӳ�亯������ʱ���ֿ�����D(z)Ϊ
���� ������������(11) ������������(11)
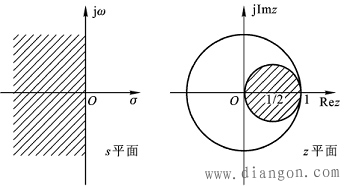
���������ַ���sƽ����ȶ�����ӳ��Ϊzƽ���һ���Ԧ�=1/2����=0ΪԲ�ģ�1/2Ϊ�뾶��Բ����ͼ7��ʾ���ɼ��������ַ���ӳ��Ϊ�ȶ�ӳ�䡣
���������ַ����������ȶ���ģ��������õ��ȶ������ֿ�����(ע�⣬һЩ���ȶ���ģ�������Ҳ����ת��Ϊ�ȶ������ֿ�����)��Ȼ������Ϊsƽ����ȶ�����ӳ�䵽zƽ�浥λԲ�ڵ�һ��Բ�ڣ��������������õ����ֿ������Ķ�̬��Ӧ��Ƶ����Ӧ������ԭģ�������������������൱��Ļ��䡣Ϊ��С���䣬���ýϸߵIJ���Ƶ�ʣ�����С�IJ�������T��
���� 
����������������ͼ6 �����ַ��ļ�������
����
������������������ͼ7 �����ַ���ӳ���ϵ
����(3) ˫���Ա任��
����˫���Ա任��Ҳ�����η���Tustin�������ǻ�������������ƻ��ֵķ������������������
���� �� ������ͼ8��ʾ�� �� ������ͼ8��ʾ��
���� 
��������
���� ������������(14) ������������(14)
������Gc(s)��D(z)��ȫ��ͬ��
����ʽ(14)����˫���Ա任����sƽ�浽zƽ���ӳ�亯���������ֿ�������������ʽ��ã�
���� ��������������(15�� ��������������(15��
��������ʽ(14)��sƽ����ȶ�����Ϊ
����
������ ������ʽ�ɻ�Ϊ ������ʽ�ɻ�Ϊ
����
������ʽ�ȼ��� 
������ 
������������ʽ��zƽ���е�λԲ���ڲ����Ӧ����ˣ������ȶ���ģ���������˫���Ա任�����Բ����ȶ������ֿ�������˫���Ա任��ӳ������z=eTs��ӳ����һ�¡�����z=eTs�Ķ�Ӧ��ϵ���ɰ�sƽ������j����ӳ��Ϊzƽ�����ĵ�λԲ�������ѭ������Ȼ������˫���Ա任��z�任����ӳ�����sƽ��Ϊzƽ��ĵ�λԲ��������ͬ�ģ�Ȼ���ڶ���ɢ����������̬��Ӧ��Ƶ����Ӧ���Ե�Ӱ�췽�棬����ȴ�кܴ�IJ��졣
����2. z�任��Ʒ�
����(1) ������Ӧ���䷨
������ ���ԭ��
����������Ӧ���䷨�Ļ���˼���ǣ���ɢ���ƺ�����ֿ�������������ӦgD(kT)��ģ���������������Ӧ����ֵg(kT)��T����
������ģ�������ΪGc(s)���䵥λ������Ӧ�IJ���ֵΪ
����
������������ֿ�����D(z),�䵥λ������ӦΪgD(kT)��
�������ԭ����ʹgD(kT)=Tg(kT)������
���� ����������(16) ����������(16)
�����ɼ�������Ӧ���䷨������������Ӧ����λ�����ڵ�Ч��ɢ������D(z)������������Gc(s)��z�任�ɱ�������������Ӧ���䷨Ҳ����ֱ��z�任����
������ �ص㼰Ӧ�÷�Χ
��������������Ӧ���䷨��z�任������Gc(s)�ȶ�����D(z)Ҳ�ɱ�֤�ȶ���D(z)��Ƶ����Ӧ��Gc(s)��Ƶ����Ӧ������������ӵ�Ƶ����Ӧ���������ǵ�����Ƶ���Dz���Ƶ�ʵ����������������Ƶ�ʻ��䡣����z�任�Ķ�ֵӳ�����ԣ����׳���Ƶ�ʡ����������
������Ӧ�÷�Χ�ǣ�����������Gc(s)Ӧ���в��ַ�ʽ�ṹ���ܽ����طֽ�Ϊ�����ṹ����Gc(s)Ӧ���ж�˥����Ƶ�����ԣ����ַ������ʺ������������źŵij��ϡ���ʱ����Ƶ���㹻�ߣ��ɼ���Ƶ�ʻ��Ӱ�죬�Ӷ���֤D(z)��Ƶ�����Խӽ�ԭ����������Gc(s)��
����(2) ��Ծ��Ӧ���䷨
������ ���ԭ��
������Ծ��Ӧ���䷨�Ļ���˼���ǣ���ɢ���ƺ�����ֿ������Ľ�Ծ��Ӧ������ģ��������Ľ�Ծ��Ӧ�IJ���ֵһ�¡�
����������ϵͳ�Ŀ�����ΪGc(s)�������ź�Ϊ��λ��Ծ����E(s)=1/s,���ΪU(s)��������ϵͳ�Ľ�Ծ��Ӧ
����
�������������µĿ�����(��Gc(s)ǰ����һ����ױ�����)
����
����ȡz�任������Ӧ�����ֿ�����
���� ����������(17) ����������(17)
��������ڵ�λ��Ծ���� ������Ӧ����Ϊ ������Ӧ����Ϊ
����
������ʽ���������ֿ�����D(z)�Ľ�Ծ��Ӧ��ģ���������Ծ��Ӧ�IJ���ֵ��ͬ��ʽ(5.17)��Ϊ���ֿ�������ģ��������ĵ�Ч��ϵ���������ױ�����Ϊ����D(z)������Gc(s)�ϵ�����ڣ�������ϵͳ�е�Ӳ�����ڡ�
������ �ص㼰Ӧ�÷�Χ
������Ծ��Ӧ���䷨����Ҫ�ص��ǣ�Gc(s)�ȶ���D(z)���ȶ���������ױ������ĵ�ͨ�˲����ԣ��ɼ��١���������ɱ�����̬���治�䡣
����Ӧ�ó����ǣ�Gc(s)Ӧ���в����ṹ��ʽ�����ֽ�ɲ��ַ�ʽ��ʽ������D(z)�ں�����ױ��������÷���ֻ�����ڵ�ͨ���磬��Ҫ�ֽ�Ծ��Ӧ�����ϵͳ����ijЩ��Ϊ��Ծ����ʱ����̬��Ӧ��������Ҫ���ض����ϣ�����������������Ч��ɢ�������Ľ�Ծ��Ӧ���������������Ľ�Ծ��Ӧ��Ȼ����ֵ��ע����ǣ��ڴ����ʵ��Ӧ������У���Ծ�����Ӧ������Ȼ����Ҫ�ģ���ȴ��Ӧ��Ψһ�ġ��������������͵����Ҳ����Ҫ�ģ�����������뿼�Ƕ���Щ�������Ӧ���ԡ����⣬������Ƶ�ʽϵ�ʱ������Ҫ������ױ���������λ�ͺ�
����(3) �㼫��ƥ��ӳ�䷨
����s�����㼫��ķֲ�ֱ�Ӿ�����ϵͳ�����ԣ�z������Ȼ����ˣ���s��ת����z��ʱ��Ӧ����֤�㼫�����һһ��Ӧ��ӳ���ϵ������s����z���ת����ϵz=eTs���ɽ�sƽ����㼫��ֱ��һһ��Ӧ��ӳ�䵽zƽ���ϣ�ʹD(z)���㼫��������ϵͳGc(s)���㼫����ȫ��ƥ�䣬��һ��Ч��ɢ��������Ϊ���㼫��ƥ�䷨����ƥ�䷨����
������������ϵͳGc(s)�е�������Gc(s)����ʽ�������⣬������������Զ������㡣Ϊ�ˣ�������Զ�������ƥ�������ַ�����
������ ������zƽ���ԭ�㣬��Щ�����(z-0)n-m=zn-m��
������ ������zƽ���z=-1������Щ�����(z+1)n-m��
������ ������zƽ���(0��-1)֮���ijһ��Ĵ�����Щ�����(z+��)n-m��
������������ƥ�䷽����D(z)����λ����������ͬ��Ӱ�죬���з���(1)ʹ��λ��ǰ������(2)ʹ��λ�ͺ���(3)��ͨ�����������ı���λ��
�����㼫��ƥ��ӳ�䷨�Ĵ����������£�
������ ���ȣ���Gc(s)��ʽ�ֽ⣬Ȼ��z=eTs��ϵ��Gc(s)�ļ���ӳ�䵽zƽ����ȥ�����磬Gc(s)�ļ���s=-aӳ��ΪD(z)�ļ���z=e-aT��
������ ���ݹ�ϵʽz=eTs����Gc(s)���������ӳ��Ϊzƽ���ϵ���㡣���磬Gc(s)��һ���������s=-bӳ��ΪD(z)�����z=e-bT��
������ ������λҪ��ѡ��ӳ�䵽����Զ�������ƥ�䷽����
������ ������ɢ��������������������������ƥ�䡣���㷽�������֣�
����(a) ������ֵ��������̬��Ӧ��ȣ���
����
������ȷ�����ֿ�����D(z)������Kz��
����������������ֵ̬��Ϊ���������ɽ����뺯��E(s)��E(z)�����һ���״�(���ɽ�Ծ������Ϊ�ٶȺ���)����ʹ��ֵ̬Ϊһ����ֵ���Ӷ���ȷȷ����Kz��
����(b)����Ƶ��������ijЩ�����������������ȷ��Kz��
������Gc(s)��ȷ����Ƶ������Gc(j��)=��Gc(j��)��.�Ϧ�(��)=A(��).�Ϧ�(��)��
����ͬ������D(z)��ȷ����Ƶ������D(ej��T)=��D(j��T)��.�Ϧ�z(��)=Az(��).�Ϧ�z(��)ѡȡijһ�������=��1����ʹGc(j��1)��D(ej��1T)��ȣ���
������Ƶ Az(j��1)=A(j��1)
������Ƶ ��z(j��1)=��(j��1)
������ʽ�����бغ�Kz�ͦ���������������������̼�����á�
����ͨ�����ϸ�����ɢ�����������۷��������Կ�������ѡ����ַ�����Gc(s)��Ч��ɢ��D(z)��Ӧ����ʵ�����ѡ���õ����½���
���� ��������T����ȡ���㹻С������ʹD(z)�ӽ�Gc(s)�����ܣ� ��������T����ȡ���㹻С������ʹD(z)�ӽ�Gc(s)�����ܣ�
����˫���Ա任������õ���ɢ�����������ڵͲ���Ƶ������Ȼ�������õ����ܣ�
���������������ΪΨһ�����㼫��ƥ�䷨������ã�
�������������ݺ���Gc(s)=Gc1(s)Gc2(s)��Gcn(s)�ɷֱ��Gc1(s)��Gc2(s)����Gcn(s)��Ч��ɢ�õ�D1(z)��D2(z)����Dn(z)����D1(z)��D2(z)����Dn(z)�ij˻���ΪD(z)��
| 
 ���ü��������ϵͳ
���ü��������ϵͳ ���������ϵͳ�Ļ�������ԭ��
���������ϵͳ�Ļ�������ԭ�� PC6313�ɼ�����ʹ��
PC6313�ɼ�����ʹ�� PC-6313 �ɼ������ܲ�������װʹ��ע������
PC-6313 �ɼ������ܲ�������װʹ��ע������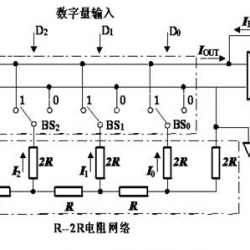 D/Aת��������ԭ��������ָ��
D/Aת��������ԭ��������ָ�� ģ�������ͨ����������ɼ�����������ʽ
ģ�������ͨ����������ɼ�����������ʽ