
|
一、PID数字控制器的基本结构及算法 1. PID数字控制器的基本结构 PID控制 PID控制兼有比例、积分和微分三种基本控制规律的优点,可使系统的稳态和动态性能以及系统的稳定性都得到改善,因而应用最为广泛。其控制规律如下: 2. PID数字控制器的程序算法 3. PID控制规律的脉冲传递函数形式 二、 PID数字控制器的参数设定 常用参数确定方法: 1. 用逐步逼近法确定PID参数 1)首先只整定比例部分。 2)如果在比例控制的情况下静差达不到设计要求,则需加进积分环节。 3)若使用PI调节器控制消除了静差,而动态性能反复调整仍不能满意,则可加入微分环节,构成PID控制。 2. 简易工程法确定PID参数 1)扩充临界比例度法 2)扩充响应曲线法 三、采样周期的选择 1.系统给定值变化频率较高时,采样频率也应取得较高,以使给定值的变化得到迅速响应。 2.如果被控对象是缓慢变化的热工或化工过程时,采样周期可以取得大些,当被控对象是快速系统时,采样周期可以取得较小。 3.当执行机构惯性较大时,采样周期可取得大些。 4.系统中控制回路数较多时,考虑到控制程序的执行时间,应取较大的采样周期。 |
 典型测控系统组成
典型测控系统组成 标度变换
标度变换 数字滤波方法
数字滤波方法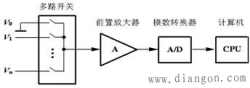 测量数据预处理技术
测量数据预处理技术 计算机控制系统组成
计算机控制系统组成 气体流量标准装置
气体流量标准装置电工学习网 ( )
GMT+8, 2021-12-6 20:44