|
一、Z变换的定义
z变换是以x(n)的序列值为系数的z-1的幂级数展开式

二、连续信号Z变换方法
1.从连续时间信号求Z变换
例4-1 试利用定义公式(4-1),求单位阶跃信号1(t)的z变换。
解: 
2. 有拉普拉斯变换求Z变换
例4-3 已知 ,求F(z)。 ,求F(z)。
解:将F(s)展开成部分分式得
查表4-1得
于是
三、Z变换的性质
注:这个可以上传到网页上
1. 线性定理
 的Z变换为 的Z变换为

2. 滞后定理

3. 超前定理

4. 初值定理

5. 终值定理

四、Z反变换
1. 幂级数展开法
例4-4 求 的反变换 的反变换 ,其中 ,其中 。 。
解:将F(z)展开成幂级数,得

2. 部分分式法
例4-5 试用部分分式法求 的z反变换。 的z反变换。
解:首先将F(z)展开成部分分式。

则
查表4-1得

于是
即 。 。
五、用Z变换解差分方程
六、Z传递函数
1. Z传递函数的定义
2. Z传递函数的联接方法
与拉氏传递函数一样,Z传递函数也可用方框图表示,并且也具有串联、并联和反馈联接三种联接方式,如图4.5所示。在三种联接方式下,系统的Z传递函分别为

串联  (4-14) (4-14)
并联  (4-15) (4-15)
反馈联接
| 
 典型测控系统组成
典型测控系统组成 标度变换
标度变换 数字滤波方法
数字滤波方法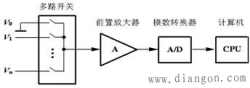 测量数据预处理技术
测量数据预处理技术 计算机控制系统组成
计算机控制系统组成 气体流量标准装置
气体流量标准装置 �幫������50010702500116
)
�幫������50010702500116
)