|
一、随机误差的处理
1.1 总体平均法
总体平均法是在相同条件下进行多次重复测量,然后求各次测量在同一时刻的算术平均值。若进行N次测量,则在tl时刻的总体平均值为:
 (3-39) (3-39) 1.2 移动平均法
移动平均法是对测量数据边平均边移动窗口,平均的次数总是N,第i点的移动平均值等于以 i点为中心,左右各 m点(N=2m+l)的算术平均或加权算术平均值y(i):
 (3-44) (3-44)
1.3 数字滤波器

对如图3.26所示的RC低通滤波器,采样间隔 则: 则:
 (3-47) (3-47)
即
 (3-48) (3-48)
或
 (3-49) (3-49)
式中  。可见,系数a+b=1。 。可见,系数a+b=1。
若取样间隔足够小,则 。滤波器的截止频率为: 。滤波器的截止频率为:
 (3-50) (3-50)
二、系统误差的处理
2.1 建立误差模型修正系统误差
2.2 分段曲线拟合法修正系统误差
目前,曲线分段拟合用的比较多的是线性插值法和二次插值法(抛物线插值法)。
线性插值:

二次插值:

| 
 典型测控系统组成
典型测控系统组成 标度变换
标度变换 数字滤波方法
数字滤波方法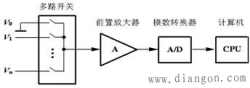 测量数据预处理技术
测量数据预处理技术 计算机控制系统组成
计算机控制系统组成 气体流量标准装置
气体流量标准装置