EtherCAT技术协会(EtherCAT Technology Group,简称ETG)是为来自于各种工业领域的主要用户公司和领先的自动化设备制造商提供的平台,旨在共同支持,推广及发展EtherCAT技术。
一、组织
ETG的组织结构
ETG的组织架构如下:
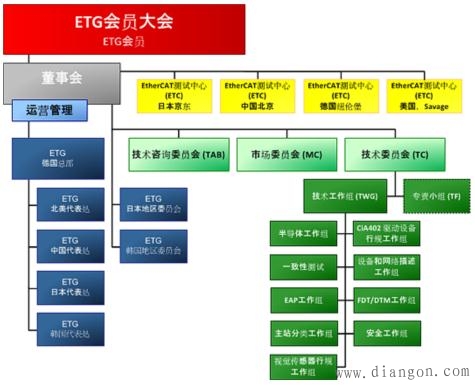
每个ETG成员都能积极参与技术工作组与项目团队的工作,为EtherCAT技术的发展做出贡献。为方便海外会员的参与,每年两次的技术委员会(TC)代表大会都在德国法兰克福国际机场附近举办。除了参加委员会外,ETG成员还可以通过技术咨询委员会(TAB)将技术更改需求直接提交给TC主席进行评估。技术咨询委员会负责审查和发布EtherCAT的详细信息,选择和批准一致性测试工具,发布最新版本。同时,技术咨询委员会也是一致性评判的仲裁机构。
全球EtherCAT推广活动由市场营销委员会(MC)牵头。ETG日本地区委员会组织发起EtherCAT在日本的推广活动,并提供资金支持。ETG全体会员大会决定ETG地方规划细则并选举董事会。ETG全体会员大会通常与SPS/IPC/DRIVES贸易展同期举行。不能到德国参加会议的会员,可在地方会员会议(如日本、韩国等)上获得最新的ETG活动信息,同时提供相应的反馈。
董事会监督管理人员,负责选择和指定EtherCAT测试中心并指导其运作。同时,董事会负责任命技术咨询委员会成员和技术委员会主席。
组织的目标
EtherCAT是开放的技术。EtherCAT技术协会推广这种技术并确保每一个对该技术感兴趣的公司都可以实施和应用EtherCAT。
同时,EtherCAT技术协会通过定义功能需求,一致性测试来保证EtherCAT实施的兼容性以及认证流程。
ETG的目标是保证EtherCAT技术满足并超越最广泛的有可能实现的任何行业的应用要求。为了实现这个目标,该协会结合了来自于机械制造,系统集成,以及最终用户和自动化供应商的领先控制和应用方面的专家,提供关于现有技术的应用案例和对协议未来如何完善的建议等高质量反馈。
EtherCAT技术协会组织用户和供应商会议(如,技术委员会),通过经常性定期会议宣布EtherCAT技术的最新进展及相关讨论。
会员的收益
ETG是全球最大的工业以太网组织, 拥有 3075 个会员单位。EtherCAT技术协会鼓励EtherCAT设备提供商加入ETG,从而获取研发产品及应用实施的支持,同时获得供应商识别码(Vendor ID)以及一致性测试工具。EtherCAT用户可以通过加入ETG表明其对该技术的支持和应用。
● ETG会员可以进入EtherCAT网页中的“会员专区”下载协议,技术实施指南, EtherCAT基础知识以及及时更新的技术信息,并加入开发者论坛。
● 仅对ETG会员提供EtherCAT研发产品的支持。
● 协会会员优先得到规范草案,白皮书,原型评估产品及首批产品,从而可首先进行评估、使用或实施EtherCAT技术。
● 会员可以合法参加工作组或技术委员会,并影响EtherCAT技术协议未来的完善。所有 ETG技术工作组(ETG Technical Working Groups)的列表可参见网站“会员专区”的相关内容。
● ETG在国际标准委员会(IEC及ISO等)上代表会员利益。
● 关于协会,更深入的技术研发和可能的市场参与,最新活动等信息(member newsletter)通过ETG的信息邮箱发布给所有会员单位。
● 会员单位可以使用EtherCAT的徽标(Logo),表现其对该技术的支持;会员单位也可以使用EtherCAT 技术协会的徽标,以表现其拥有该协会的会员资格。
● ETG会员有权在 EtherCAT产品指南( Product Guide)上及ETG全球主要自动化展览会的联合展台上推广其EtherCAT产品。
● 成为会员是免费的,不收取任何费用。
如何申请ETG会员
通过电话或电子邮件联系ETG总部或当地的ETG办公室。提供必要的信息,例如要求以及会员申请表,有兴趣的客户可以在网站的下载专区下载 ETG By-Laws申请表。
二、技术
EtherCAT – 以太网现场总线:
● EtherCAT 一网到底,协议处理直达I/O层;
● 无需任何下层子总线;
● 无网关延迟;
● 单一系统即可涵盖所有设备: 输入输出,传感器,执行器,驱动,显示。
EtherCAT 速度更快:
● 传输速率:
● 2 x 100 Mbit/s (高速以太网, 全双工模式) 。
● 刷新时间:
● 256 数字量 I/O:11 μs;
● 分布于 100 节点的 1000 开关量 I/O:30 μs = 0.03 ms;
● 200 模拟量 I/O (16 bit):50 μs, 采样率 20 kHz;
● 100 伺服轴(每个 8 Byte IN+OUT): 100 μs = 0.1 ms;
● 12000 数字量 I/O: 350 μs。
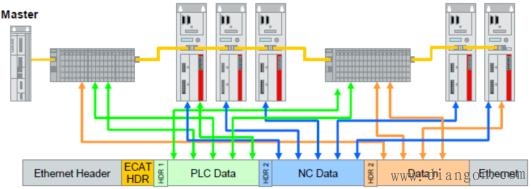
飞速传输的以太网帧:
● 在帧的传输过程中过程数据被提取或插入:
● 每个从站的过程数据量几乎无限制(1 Bit…60 Kbyte, 如果需要则使用几个以太网帧传输);
● 每一个循环中帧的报文数据构成可以不同。如:超短循环时间用于轴数据,稍长循环用于I/O刷新;
● 支持异步的、事件触发的通信。
● 隐含式寻址方式实现协议消耗最小化:
● 针对分布式I/O的优化报文结构;
● 通讯完全在硬件中完成—最优性能(+可预测);
● 若网络中全部为EtherCAT设备,则无需交换机;
● 出色的诊断功能;
● 保留对以太网的兼容性。
分布时钟:
● 精准同步 (<< 1 μs!) — 通过分布时钟的精确校准实现;
● 采用Scope View长时间监视两个独立的设备;
● 两设备间距300 个节点,线缆长度120米。
EtherCAT 是工业以太网:
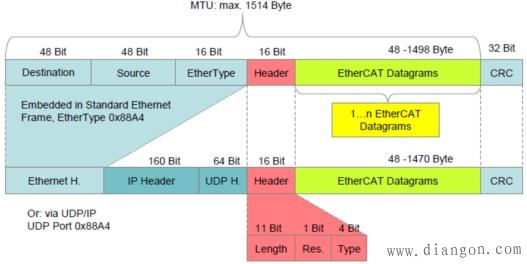
● EtherCAT 采用标准以太网帧: IEEE 802.3;
● 可替换为UDP/IP (若需要IP路由);
● 保持标准的以太网帧;
● 对TCP/IP完全透明;
● 所有因特网技术(HTTP, FTP, Webserver,…) 均可实现,且不影响系统的实时性能!
EtherCAT 接线更灵活:
● 标准以太网拓扑结构:星型拓扑;
● 灵活的树型结构 – 自由扩展;
● 支持各种拓扑结构,如线型,星型,树型,总线型;
● 可实现多层次拓扑;可自由组合各种拓扑;
● 每个EtherCAT网段可容纳65,535个节点,网络规模几乎无限。
● EtherCAT支持多种以太网物理层:
● 100BASE-TX (两节点最大间距100米);
● 100BASE-FX(两节点最大间距2公里);
● LVDS (模块化设备);
● 允许任意数量的物理层改动。
EtherCAT 配置更简单:
● 拓扑结构:
● 拓扑目标与现实的自动对比;
● 诊断:
● 精确定位故障;
● 网络规划:
● 系统性能独立于:
● 从站的实施;
● 拓扑结构 (无交换机/集线器);
● 寻址:
● 无需手动编址;
● 自动进行地址配置;
● 地址可被保留;
● 添加新节点是无需重新配置整个网络的地址。
EtherCAT 成本更低:
● 主站:
● 无需专用插卡(辅助处理器);
● 主板集成的网口即可满足要求;
● 从站:
● 低成本从站控制器;
● FPGA 或 ASIC;
● 简单的从站:无需实施微处理器;
● 无需功能强大的微处理器;
● 基础设施:
● 无需交换机/集线器;
● 标准以太网线缆和接头。
● 实施工具:
● 标准以太网监测工具,如,微软网络监视器或Wireshark: 免费获取;
● 解析软件: 免费获取;
● 网络规划仅需少量的工作:
● 简单的组态;
● 默认配置即可生效,无需网络调试;
● 改善的诊断:
● 更快的排错可以减少停机时间;
● 快速配置:
● 无需地址配置。
EtherCAT实施轻松:
● 从站的实施:
● 所有实时性相关功能都由ASIC或FPGA实现;
● ESC硬件中处理实时协议;
● 集成通讯状态机;
● 网络性能独立于:
● 从站微处理器的性能;
● 协议堆栈。
● 对于使用或不适用微处理器(作为Host CPU)的应用:
● 集成了DPRAM (1…8kByte);
● 集成了分布时钟;
● 对微处理器的高精度中断。
● 主站的实施:
● 可采用主站样本代码(源码);
● EtherCAT配置工具;
● ESI和ENI的XML文件格式。
EtherCAT功能安全:
● 为在EtherCAT安全设备间传输安全性过程数据,Safety over EtherCAT (FSoE)定义了一个安全通讯层。
● FSoE是EtherCAT 技术协会的一项开放技术。
● 该协议基于IEC 61508开发,因此:
● 满足安全完整性等级 (SIL)3;
● 残留误差概率 R(p)< 10-9;
● 该协议获得独立的TüV 认证;
● SoE 帧映射在循环的PDO中:
● 最小的FSoE帧长:6 Byte;
● 最大的FSoE帧长:取决于从站设备的安全过程数据的数量;
● 因此协议适用于安全IO及功能安全运动控制的应用;
● 从FSoE主站到FSoE从站的被确认传输,反之亦然;
● 安全设备参数可以在FSoE连接启动时,从主站下载到从站;
● 经认证的Safety over EtherCAT产品从2005年开始上市;
● FSoE协议不局限于:
● 通讯层及接口通讯层不是安全测量的部分:黑色通道(assumed unsolved bit error rate: p = 10-2);
● 传输速度;
● 安全过程数据长度(Length of safe process data);
● 可通过非安全网关,现场总线系统或骨干网路由;
● 可以由非安全网关路由;
● 可由现场总线系统路由;
● 适用于(几乎所有)总线系统的一种安全技术。
三、应用
1.超高速 EtherCAT 助力空客高升力系统
位于德国不莱梅的空客工厂测试并生产A380 的机翼,在其测试系统中采用了倍福公司(Beckhoff) 的工控机和EtherCAT 系统。

在德国不莱梅的空客基地,空客公司为其飞机的提升系统装备了“高升力”系统测试平台。该测试涵盖了飞机在飞行不同阶段中可产生“额外提升力”的所有相关功能部件,其主要组件包括着陆翼、着陆板,以及所有航行子系统的驱动和控制部分。
空客测试平台的尺寸和系统与原始的尺寸大小相匹配,巨大的钢架结构包含了高升力系统所需的功能元件,虽然每次只对一个机翼进行配置,但一次可全部完成对驱动轴的装配。为了检测在不同情况下驱动和控制系统之间的交互情况,相应的机翼以一个四象限的驱动和若干模拟的信号建立模型。
通过该测试平台,空客公司可完成多种研究。例如,用液压缸和气缸来模拟不同飞行阶段中各部件所受到的空气动力学负载。此外,通过对计算机控制的模拟,可以对一些特定的项目进行研究,比如模拟在长时间下某些结构元件的失效等。测试过程中,各个部件的运动,如副翼的伸展、撤回、摆动等,都由原始飞机控制系统控制,因此,飞机控制系统与测试平台的控制系统是相互独立的。
测试平台的控制系统
测试系统控制所有模拟空气动力学负载的液压缸和气缸,并对各种参数进行记录。在特定情况下,动力负载会非常大,因此测试平台的设计还要考虑到安全问题。除了人身安全防护之外,所有的防护措施都聚焦在元件上,如某些作为原型的、或者是价格非常昂贵的零部件。因此,系统中设计了多处的紧急停止、权限控制、带核查的信号冗余记录,以及对执行部件的安全控制。
位于德国 Essen 的Ingenieurgeinschaft 公司,接受了委托,来设计这个测试平台控制系统。使用EtherCAT 技术来完成这样一个控制系统,这还是首次。工程师们开发的系统主要是工程测试和液压控制,该团队由15 名来自不同行业背景的专家组成,如机械工程师、电气工程师、IT专家等。
EtherCAT 端子:超高速I/O 系统
高升力系统的规模之大从控制信号的数量上就可见一斑。系统中的数字/模拟量信号超过500 点,其中包括大约100个来自不同控制电路和检测电路的执行信号。所有的I/O数据都通过倍福的EtherCAT 端子系统进行处理。
Torsten Finke 博士是Ingenieurgeinschaft 公司的三位经理之一,他如此解释EtherCAT 技术给该项目带来的好处:“通过以太网,所有信号都能够以一种更加可靠、简单和快速的方式进行控制。由于模拟信号到端子的距离大大缩短,通过模数信号的转换,克服了信号传输的长距离所带来的问题。该系统的灵活性非常好,十分适合目前的项目。并且,EtherCAT 的总线拓扑结构克服了传统的星型结构,大大减少了电缆的成本以及发生错误的可能性。EtherCAT 在带宽和传输速度上都提供了一个很好的解决方案,并且,凭借超过10Khz 的时钟频率,整个系统实时性也得到了保证。”
同样,EtherCAT 技术的开放性也是一个很突出的优点,它可以独立于主机平台。例如,EtherCAT主机程序是在Linux 平台下开发,并在项目中得到了很好的应用。Torsten Finke 博士解释道:“主机程序运行在一台通用的标准工控机上。系统中不需要专用的plc,Linux 是个先进的服务器操作系统,并且,已被证明具有良好的稳定性、高效性,尤其是在网络方面。和RTAI-Linux 内核的实时延伸相结合的开放式构架使得操作系统能够得到硬实时性能,而在程序和服务方面没有什么限制。”

来自倍福 的C51xx 工控机提供了强大的计算能力。并且,诸如文件和Web 服务等传统任务,也可以完成高精度时间的同步应用,这对系统进行实时分析是很重要的。EtherCAT 技术在EhterCAT 传输之上还提供了传统以太网的优点,在同一硬件平台上将实时和非实时通讯结合在一起,这是EtherCAT 技术的一个重要特征。
软件
控制逻辑可以通过 Matlab 的Simulink 来进行精确地开发。该数学模型可以转化为C 代码,编译并以二进制模块加载到控制系统的内核中。计算机间的通讯通过客户服务器接口来进行。控制界面程序可以满足不同的测试需求,同时,该软件可以在网络的任何电脑上运行。

通过特定的数据登录服务,测试操作被记录在计算机上并对整个处理过程拥有控制权限。该记录操作可以根据具体情况对各个细节进行设置。系统记录下连续信号和离散事件,并提供给相应的程序进行分析。数据组织可以在任何时间对数据进行操作。EhterCAT 在大数据量交换的场合发挥了很大优势,尤其是在一些纯数据采集并且允许一定延时的情况下。有了EtherCAT现场总线技术,在仪表工程方面将不再有限制。
Torsten Finke 博士总结了EtherCAT 技术在该项目中的应用:“空客方面对测试平台的控制系统有着很高的要求。在该项目中,EtherCAT 在技术、构造、成本等方面都提供了一个完美的解决方案,空客的高升力装置已获益于此。”
2.KUKA 公司 KR C4 机器人控制器采用高速、高确定性的工业以太网 EtherCAT
在 1996 年,KUKA 机器人公司是全球首个引入基于 Windows PC 机器人控制器的机器人制造商。第一代控制器的成功激励了其广泛采用基于 Windows 的技术及基于 PC 技术,以带来更高的处理器性能。将 IT 产品移植到自动化应用需要敢于创新,这使实现更高性价比成为可能。当新一代机器人控制器计划制定后,除了 Windows 和 PC 以外,KUKA需要从 IT 界移植另一项成熟技术:基于以太网的、稳定的通信技术。机器人控制通信要求高性能、高速且具有良好时间确定性总线系统。因此,在 2010 年,KUKA 采用 EtherCAT 作为其 KR C4 机器人系列控制器的系统总线,采用开放的标准实现顶级的性能。

为了在自动化系统中集成机器人,一个标准的现场总线常被用于 IO层、底层单元及系统层的机器人控制器的通信。通常这样的现场总线由客户选定,而机器人控制必须可以连接到现有工业现场中。
同样在机器人控制器中,不同组件(如伺服驱动器、位置变送器)之间的数据传输复杂,因此必需实施一种能满足更高实时要求的控制任务。此外,内部设备必须进行安全技术和控制设施的数据交换。在之前的 KR C4 控制器中,KUKA 采用了多种通信技术,因此必须使用各种不同的接头和线缆。当研发新的 KUKA 控制器时,他们重新审议了继续使用新的基于以太网的技术——满足实时性和安全需求,同时具备 IT 技术特性。以太网具备采用同样一根线缆传输多种不同协议的特点,从而可显著减少系统中的线缆数量。
KUKA 的另一个研发目标是减少不同通信技术的数量,并要求现场总线及内部总线尽可能保持一致。同时,尽量避免专用技术,而采用被广泛认可的开放的工业标准。此外,使用配备有智能软件功能的高速现代多核 PC来取代性能受限的硬件。越少的硬件意味着更高的平均故障间隔时间及更低的开发工作量、更低的单位成本及物流成本。其研发目标是硬件设备减少三分之一,而接头和线缆的成本甚至可以降低 50%。
与现场总线层的通信:软件堆栈还是网关?
由于 PC 中集成了以太网硬件,与 PROFINET 或 EtherNet/IP 这些基于以太网的现场总线的连接在软件中完全得以实现,而无需后期的专用硬件支持。与传统现场总线(如 PROFIBUS 或者 DeviceNet)通过 EtherCAT 通信网关联接,无需接口卡。
内部及与传感器,执行器及 IO 的定位通信:以太网和 EtherCAT
除了标准的以太网,完整的内部通信以及与底层 IO 层都通过 EtherCAT通信。因此,KR C4 机器人控制器在保持之前的总线布局下仅采用 2 种不同的通信协议(线缆、接头和以太网控制芯片)。
机器内部方面, 在建立连接或在 RoboTeam 中时间同步多个机器人控制器,连接一个工程笔记本电脑时,则采用标准的以太网来寻址 SmartPad KUKA 控制面板。
除了标准的以太网外, 使用EtherCAT 作为通信技术成为一种必然。这是因为标准的以太网技术并不能满足对实时能力和安全协议的要求。而 EtherCAT 作为一个内部驱动总线,可用于寻址机器人内部的安全设备,以及 SmartPad 中安全相关的控制组件。此外,机器为寻址本地 IO 模块、网关或传统现场总线集成了一个 EtherCAT 主站接口。
为何选用 EtherCAT?
与其他实时以太网技术相比,选用 EtherCAT 作为实时和安全通信技术的原因是 EtherCAT 有更多优势支持 KUKA 实现研发目标。EtherCAT 不需要特殊的主站硬件,仅在从站端需要。在主站,一个标准的以太网控制器即可完全满足硬件要求,对 KR C4来说很多主站都是在 PC 中实施的。此外,线缆和接头也是标准的以太网。
EtherCAT 独特的“on the fly”的数据处理方式(帧进行飞速传输的同时,从站进行数据处理)可以实现大数据吞吐量并使以太网数据有效率接近 100%。因此,这就可以将原来在硬件设备中实现的很多功能转移到控制PC 的软件中实现。
EtherCAT 的安全协议 Safety over EtherCAT可以通过 EtherCAT 或以太网进行通信。KR C4 的基于 PC 的中央安全控制器也运行在专用的软件中,与所有安全相关的设备(如本地安全模块及 SmartPad )进行通信。
除了 PROFINET 和 EtherNet/IP 现场总线外,EtherCAT 是全球接受最广泛的工业以太网通信技术,EtherCAT 拥有最大的供应商和用户组织。市场上众多的 EtherCAT 从站设备可满足多种不同的新工业方案。而另一个优势是:从最初发布时至今,EtherCAT 标准、协议和 ASIC 芯片从未改变,从而保持了非常好的稳定性。

国际组织 EtherCAT 技术协会宣传、支持和推广 EtherCAT 技术。2010 年采用了 EtherCAT 的 KUKA控制器成功实现了在所有机器人中的应用。除了 KR C4 机器人控制器外,新的 KR AGILUS 机器人和 LBR iiwa 轻型机器人配备的紧凑型控制器也基于EtherCAT 技术实现。总之,在 KUKA 机器人控制器计划中,仍把 EtherCAT作为一项基础技术实施。

 电表怎么看度数
电表怎么看度数 插座烧毁原因_插座烧后还可以继续使用吗?
插座烧毁原因_插座烧后还可以继续使用吗? 注册电气工程师考试挂靠,到底富了谁?
注册电气工程师考试挂靠,到底富了谁? 电工证可以“挂靠“吗
电工证可以“挂靠“吗 电工证怎么考?如何自考电工证
电工证怎么考?如何自考电工证 电工证种类和图片大全
电工证种类和图片大全